7/7/2016
二回生の方に教えてもらった事を復習♪
PID制御とは?
P,I,D三つを組み合わせたもの。
P 比例項
I 積分項
D 微分項
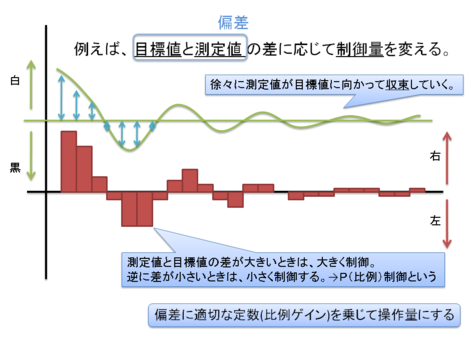
P制御とは?
目標値と現在値の差に応じて、比例的に制御を変える。大きくずれてると大きく戻そうとする、今通った瞬間の差を見るための制御。
問題点
次のURLではhttps://thinkit.co.jp/sites/default/files/articles/192703.png
{kind=link}
上手く収束してっているように見えるが、実際には一度大きな誤差が出るとなかなか振動が収まらなかったり、最悪の場合はずっと発散したりする。
(ライントレーサの動作より)出力を大きくするとガタガタする。これを少しでもよくするためにD制御。
D制御とは?
現在値と目標値との差が大きく出た時に瞬間的に大きく出たら大きく戻さないといけないっていうのを未来の事だけど、大きく戻さないとどっかに飛んでっちゃうっていうのを埋め込ませて中心に戻そうとする制御。
問題点
PID全て合わせた時に、全体におけるDの荷重大きくすると偏差が0に近い時でもガタガタしてしまい、Pで直線を走らせてる時と比べ、速度が落ちる。Pだけに比べると調整が大変。
次はI制御を学習しよう